



Alex73
-
Постов
70 -
Зарегистрирован
-
Посещение
Посетители профиля
1 615 просмотров профиля

Достижения Alex73
Пользователь (2/3)
3
Репутация
-
Актуально.
-
Цена снижена.
-
Продано. Видеокарта Gigabyte AORUS GeForce GTX 1080 Ti [GV-N108TAORUS-11GD] Одна штука. Новая, в упаковке. Местная и Московская гарантия. Возможна отправка в любой регион РФ. Для поболтать - пишите в ЛС. Только для реально заинтересованных, Тлф.
-
Приветствую. S1 - 8шт интересует?
-
З.Ы. И вообще, мы как то очень сильно отвлеклись от темы, скатились почти до флуда... ТС уже на 9-ом сообщении остался удовлетворен и отвалился. Итог: выбранный аффтаром девайс будет работать, так же как и варианты предложенные Uliss и вариант r2d2 (смотреть сообщения #4, #10) Больше в теме нет полезной инфы. ИМХО: Значительно целесообразнее управлять 4-pin вентиляторами по выводу PWM, чем по силовому питанию. За сим позвольте откланяться.
-
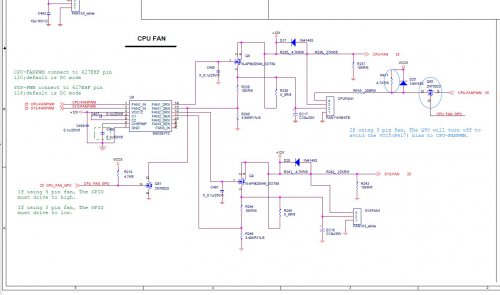
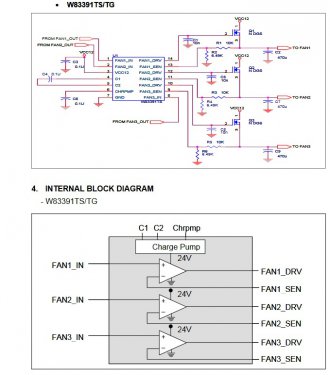
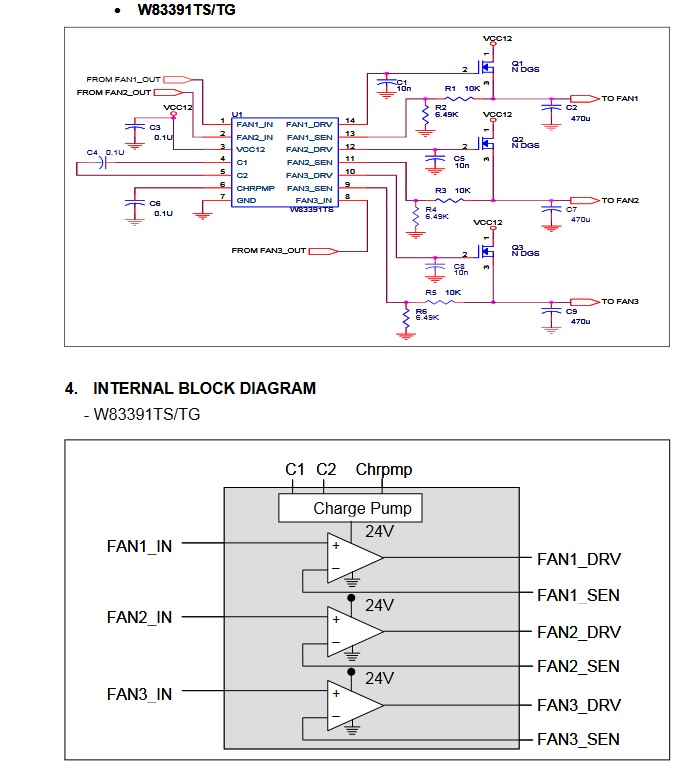
В вашем частном случае да, пропеллер управляется постоянкой. MSI местами "чудная" контора. Это ровным счетом не означает, что так всегда и везде. Кусок схемки именно вашей М/В. WINBOND PRE DRIVER DC FAN
-
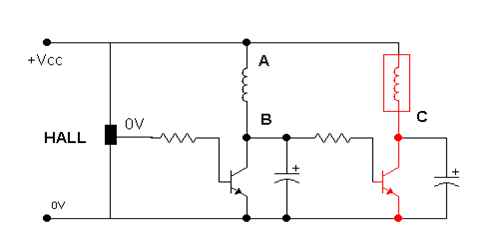
Функции драйвера и для этого ему нужен датчик холла. 1. Первоначальный старт из остановленного состояния 2. Синхронизация коммутации фазовых обмоток статора с полюсами ротора. 3. Определение момента блокировки (остановки) ротора, снятие силового управляющего напряжения с обмоток статора (исключение перегрузки драйвера и обмоток), переход в режим повторного старта. Нет, не так. Нет ни какой стабильной частоты. Нет ни каких частото задающих элементов у драйвера. Частота вращения ротора зависит только от соотношения мощности крутящего момента приложенного от статора к ротору и сопротивления вращению ротора с лопастями обусловленного сопротивлением воздуха. ВСЁ. Вот именно, если коммутировать принудительно неким контроллером, то так и будет. Например прямой привод в стиралках. Но это не наш случай. У нас система с самовозбуждением, обратная связь через ДХолла. Пример простейшего, были такие вентили во времена IBM PC-XT А теперь драйвера используют, примеры даташитов. http://pdf1.alldatasheet.com/datasheet-pdf/view/173061/UTC/SK6406.html http://www.njr.com/semicon/PDF/NJM2644_E.pdf http://www.onsemi.ru.com/pub/Collateral/EN6204-D.PDF
-
Изначально изучите мануал на неё, имеется ли возможность управления вентиляторами на 3-х пиновых разъемах, это есть не всегда и не во всех мамках, если вы так подумали. Обычно называется технология (режим) SMART FAN в биосе или нечто подобное.
-
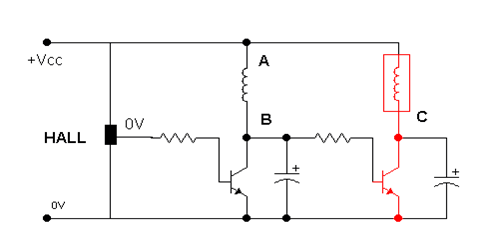
Это как расшифровать? :) при всем уважении, далеко не всегда так. Ваша же картинка в 4 посту. Коммутатору обмоток нужно знать положение ротора.
-
Это что за пёрл? Как была "система с принципом" 25 лет назад, так и осталось, без сколь либо значительных изменений. Самое значительное изменение, появление 4-го пина... Купите новый разберите, отрисуйте и удивитесь... А потом раскажите. А перл про "вентильный двигатель", это вообще нечто... Опять читаете по диагонали??? Цитирую ключевую фразу: Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений[2]. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ). У нас именно эти самые БДПТ! Им насрать что шим будет дергать постоянно!
-
Повторяю ещё раз: HIP6601 это драйвер мосфетов VRM!!!!! Не имеет ни какого отношения к FAN!!!! Читайте даташит! У меня не теория, а практика и знания! Он вам точно не нужен... Свое мнение при себе и оставьте. А грамотные люди будут делать так, как правильно и эффективно.
-
ЖИРНАЯ ОШИБКА!!! Это всего лишь ДРАЙВЕР управления мосфетами, очевидно процессорного инвертора. Ни коим образом не относится к управлению карсоном. Мне очевиден Ваш уровень, дальнейшую дискуссию переходящую в разжевывание элементарных основ, считаю бесперспективной. И если уж козыряете словами типа PDF, так будьте любезны научится в них разбираться и правильно читать. Подведу итог: Вот тут все верно, и будет работать, и работает. https://forum.bits.media/index.php?/topic/37418-upravlenie-oborotami-servernogo-ventiliator/?p=687320
-
Кстати, модель вентилятора будет любая имеющая 3 пина, коих огромное множество. Чтоб не было недопонимания это: плюс, минус и тахо. Это реализовано НЕ В ВЕНТИЛЯТОРЕ! Если в общих чертах и простым языком: мать читает тахо с вентеля, и сообразно настройкам БИОСА (пользователь выставил пониженные обороты, либо обратная связь по температуре) мультик производит шим управление силовым мосфетиком расположенным как правило непостедствено около разъёма на мамке SYS_FAN 3pin. Подчеркнутое ещё один ориентир для поиска интересующей вас мамки. И никоим образом не противоречит блок-схеме вентилятора от @Uliss, и вашей вырезке из даташита на драйвер вентиля.
-
Вам такие золотые слова известны... Действуйте.У меня не 5 компов, а тысячи мамок в ремонте прошли... Могу подсказать, ищите мамки с разъёмами SYS_FAN 3pin, относительно старого парка, 775, АМ2.
-
@Uliss, Знаю, может не совсем корректно выразился, но сейчас именно об этом спор. Я специально заострил на этом внимание. В компьютерном железе есть негласное разделение: PWM вентилятор - 4pin, силовой ключ в самом вентеле, а 3-х пиновый с внешним ШИМ управлением - ключ в мамке. И как то ничего, все работает. Да ну? Матчасть изучайте!

-
Последние посетители 0 пользователей онлайн
- Ни одного зарегистрированного пользователя не просматривает данную страницу